

|
I am a MSR student at CMU advised by Prof. Deepak Pathak. My broad research interests lie in generative modeling, AI4Science and reasoning. Email / Github / LinkedIn / Google Scholar |

News |
| [Dec 2024] | Our paper on backdoor and adversarial attacks targetting SSL was accepted at ICASSP 2025. See you at Hyderabad! |
PublicationsDenotes selected / highlighted publications |
|
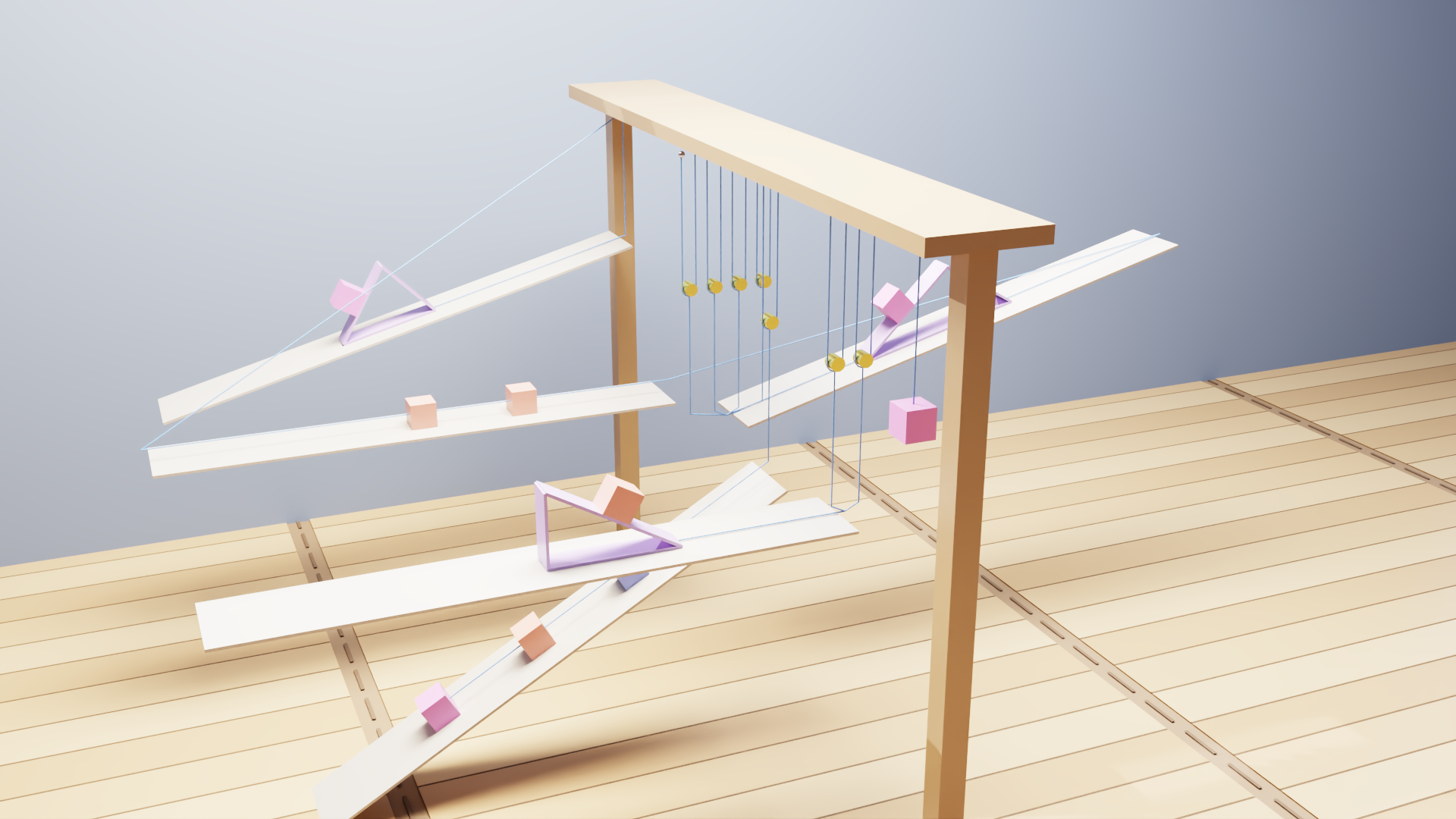
Aryan Satpathy*^, Mihir Prabhudesai*^, Yangmin Li^, Zheyang Qin^, Nikash Bhardwaj, Amir Zadeh, Chuan Li, Katerina Fragkiadaki, Deepak Pathak (* denotes co-lead, ^ denotes core contributors) arXiv video / website / pdf / code Converting physics simulators into cheap, scalable data generators to distill physical reasoning into LLMs. |
|
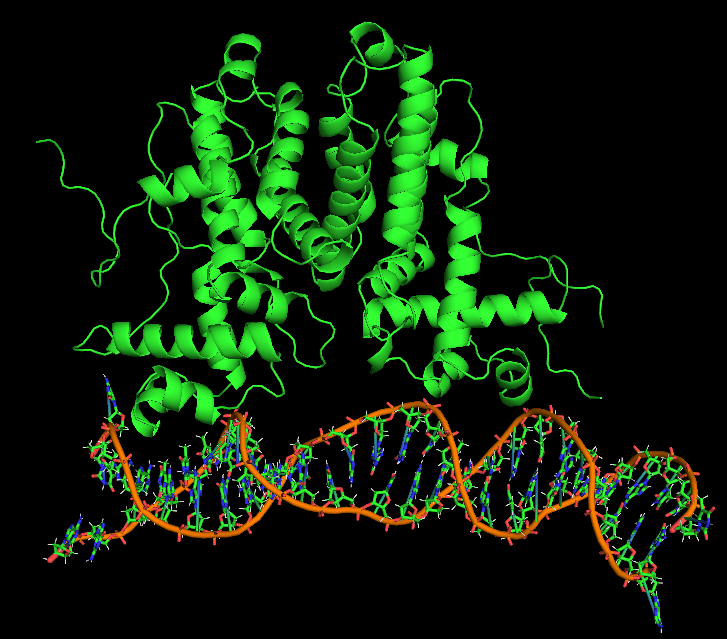
Dhruva Rajwade, Erica Wang, Aryan Satpathy, Alexander Brace, Hongyu Guo, Arvind Ramanathan, Shengchao Liu, Anima Anandkumar Neurips 2024 Workshop Foundation Models for Science: Progress, Opportunities, and Challenges openreview / code Understanding DNA Protein interactions using Deep Learning. |
|
Aryan Satpathy*, Dhruva Rajwade*, Nilaksh*, Somesh Kumar to appear at ICASSP 2025 (* denotes equal contribution) paper / code Defense against backdoor attacks targetting SSL. |
|
Aryan Satpathy, Millon Madhur Das, Natalia Hartono, Duc Pham In: Pham, D.T., Hartono, N. (eds) Intelligent Engineering Optimisation with the Bees Algorithm. Springer Series in Advanced Manufacturing. Springer, Cham. chapter / code Bees Algorithm for Green Vehicle Routing Problem with multiprocessing support. |
Projects |
|
MITACS GRI, 2023 code / documentation Multi-modal multi-object detection and tracking with overhead camera and LiDAR sensors. |
|
Self Project code Implemented 6-DOF Stewart Platform and SeeSaw Environment(1-DOF approximation of Stewart Platform), in the IsaacGym framework. |


|
IMAV Indoor Challenge, 2023 code Perception stack with Lane Tracking and QR landing abilities for drones in indoor setting (without GPS reliance). |
|
Self Project code / video Shader implementation of Raytracing, Fog and other effects. |
|
This webpage uses Jon Barron's template. Do not scrape the HTML from this page itself, as it includes analytics tags that you do not want on your own website — use the github code instead. |